溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇文章給大家分享的是有關基于Arduino+OpenCV的顛球機器人是怎樣的,小編覺得挺實用的,因此分享給大家學習,希望大家閱讀完這篇文章后可以有所收獲,話不多說,跟著小編一起來看看吧。
17年電賽那個題目,常用的解決方案是把攝像頭放在上面,而且小球只在平板上進行二維運動。這個項目是把攝像頭放在了透明玻璃的下面,小球的高度和和攝像頭采集的小球圖像大小成比例關系,在二維運動的基礎上升級為了三維立體運動。
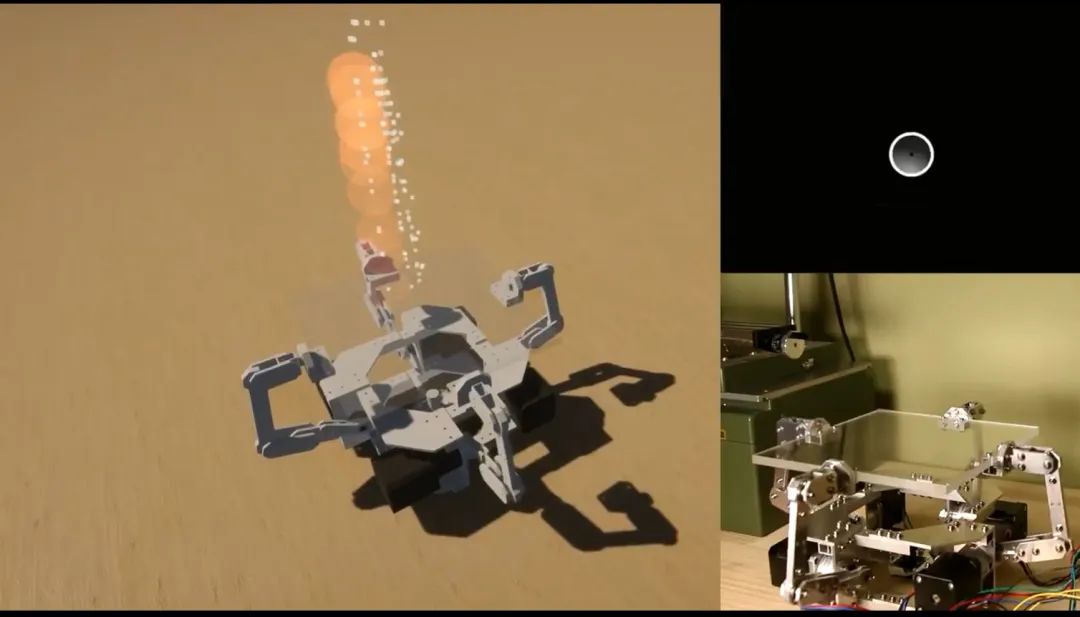
這是一個基于步進電機 + Teensy 4.0 + OpenCV實現的乒乓球控制系統,整個項目實現原理的框圖如下:
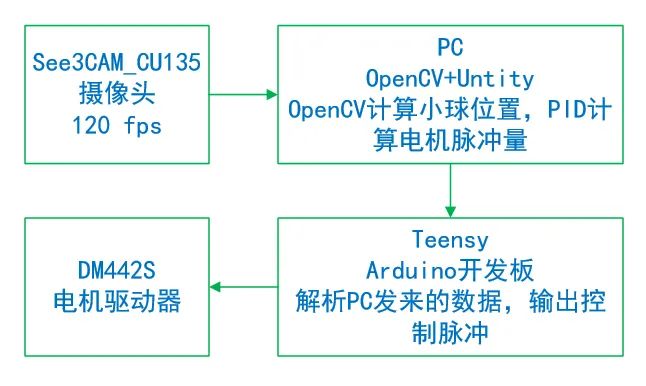
主要分為上位機和下位機,上位機是通過攝像頭采集的圖像,使用OpenCV算法進行圖像處理,計算出小球的三維位置,然后通過PID算法,計算出每個步進電機所需要運動的角度,然后通過串行總線把數據發送給下位機Teensy開發板,開發板根據上位機發來的數據,解析出4個步進電機所需的角度,然后通過PWM輸出脈沖信號給驅動。
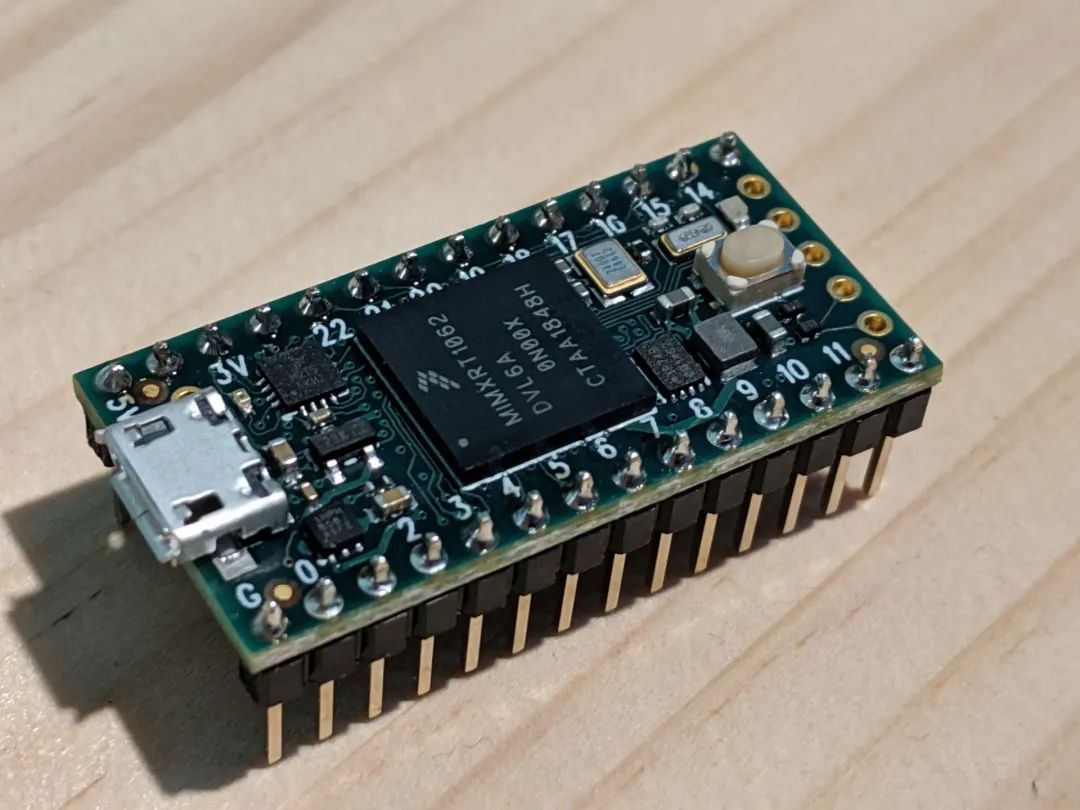
1塊Teensy 4.0開發板,主頻600MHz,基于i.MX RT1060,可以使用Arduino開發。
1個 DM442S 步進電機驅動器,可同時驅動4路步進電機
4個Nema 17 42步進電機
1個48V 8A的電源
1個高分辨率的See3CAM_CU135攝像頭
1臺安裝OpenCV的Windows電腦主機
Teensy 4.0開發板,使用NXP RT1062,可以當做Arduino來使用。
所使用到的步進電機和驅動器。

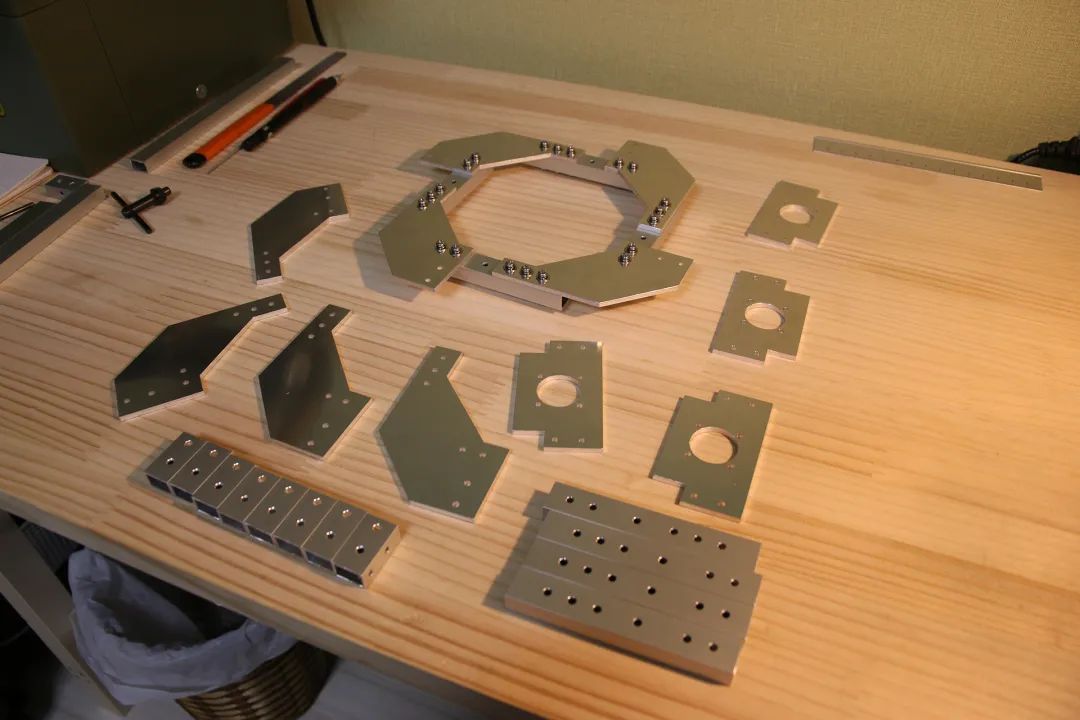
3D打印的五金零部件。

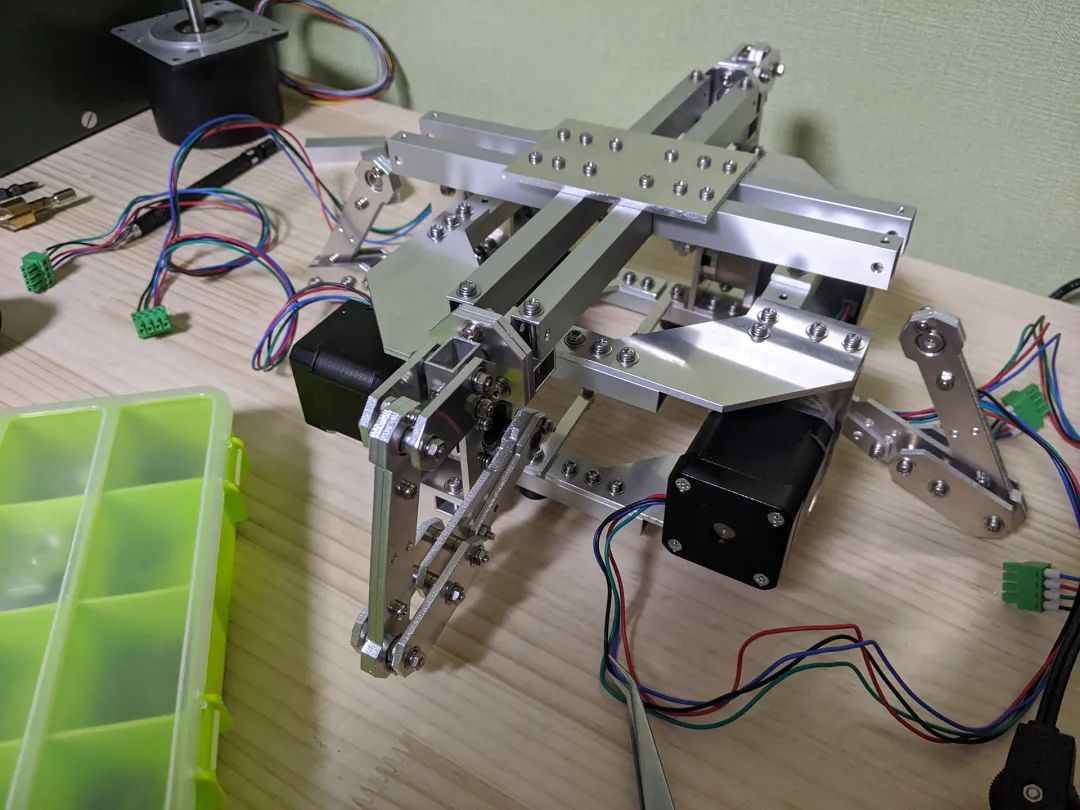
組裝效果。

以上就是基于Arduino+OpenCV的顛球機器人是怎樣的,小編相信有部分知識點可能是我們日常工作會見到或用到的。希望你能通過這篇文章學到更多知識。更多詳情敬請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





