溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
今天給大家介紹一下Apollo是怎么加速服務機器人應用落地。文章的內容小編覺得不錯,現在給大家分享一下,覺得有需要的朋友可以了解一下,希望對大家有所幫助,下面跟著小編的思路一起來閱讀吧。
前段時間,在南岸保時捷中心舉辦的一場答謝宴中,一臺智能服務機器人RS-14引來了現場無數人的目光,它是基于思嵐Apollo(阿波羅)機器人底盤研制的一款展廳服務機器人。能在現場完美做到開展導引、導覽等功能,最主要的是它能實現自主行走、避障。
Apollo 是思嵐科技推出的新一代中小型機器人開發平臺,旨在幫助機器人企業加速服務機器人產品的落地,無需在機器人底層行走技術中耗費過多研發成本和精力。同時提供開放的軟硬件接口,基于RoboCloud云服務,讓機器人開發更簡單。
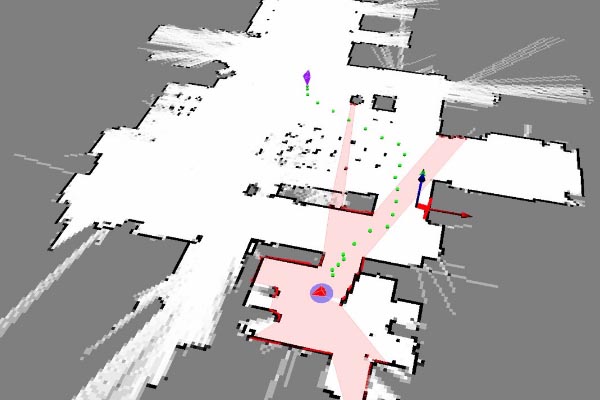
我們都知道機器人實現自主行走的前提是能做到自主定位導航,而Apollo機器人底盤搭載了激光雷達傳感器、超聲波傳感器、防跌落等傳感器。并在底盤之上配置深度攝像頭傳感器。同時配合自主研發的SLAMWARE自主導航定位系統,讓機器人實現自主建圖定位及導航功能。

當 Apollo 處于未知環境中,無需對環境進行修改,利用SharpEdgeTM精細化構圖技術,構建高精度、厘米級別地圖,具備超高分辨率,不存在誤差累加。同時利用D*動態即時路徑規劃算法尋找路徑并移動到指定地點,無需二次優化修飾,可直接滿足人們的使用預期。
除此之外,基于純軟件方式,無需額外進行輔助鋪設,可對Apollo進行預定路線設置,或通過設置虛擬墻及虛擬軌道阻止Apollo進入某個工作禁區。
在工作過程中當 Apollo 出現電量過低的情況時,可支持可外部調度的預約式充電自主導航定位,自動返回充電塢充電。
除以上核心功能外,Apollo的擴展接口還集成了網口,供電接口和各種控制接口,以便用戶快速進行開發擴展。Apollo可通過有線網絡或WIFI與外部通信,其本身自帶的電池可為自身與外接的擴展模塊供電,用戶可通過各種控制接口對整個Apollo及其上層擴展模塊進行控制。
以上就是Apollo是怎么加速服務機器人應用落地的全部內容了,更多與Apollo是怎么加速服務機器人應用落地相關的內容可以搜索億速云之前的文章或者瀏覽下面的文章進行學習哈!相信小編會給大家增添更多知識,希望大家能夠支持一下億速云!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





