溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本文實例為大家分享了Python+OpenCV實現圖像的全景拼接的具體代碼,供大家參考,具體內容如下
環境:python3.5.2 + openCV3.4
1.算法目的
將兩張相同場景的場景圖片進行全景拼接。
2.算法步驟
本算法基本步驟有以下幾步:
步驟1:將圖形先進行桶形矯正
沒有進行桶形變換的圖片效果可能會像以下這樣:
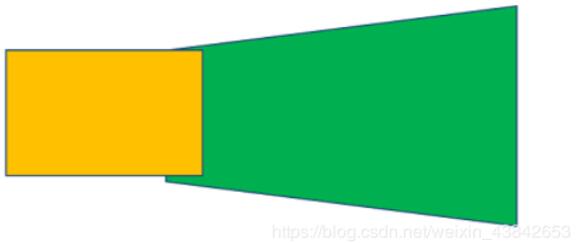
圖片越多拼接可能就會越夸張。
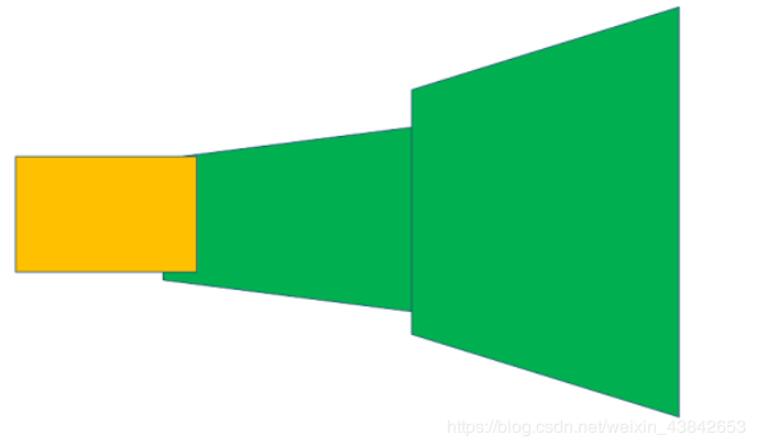
本算法是將圖片進行桶形矯正。目的就是來縮減透視變換(Homography)之后圖片產生的變形,從而使拼接圖片變得畸形。
步驟2:特征點匹配
本算法使用的sift算法匹配,它具有旋轉不變性和縮放不變性,具體原理在之后會補上一篇關于sift算法的文章,這里就不做詳細介紹。
在匹配特征點的過程中,透視矩陣選取了4對特征點計算,公式為
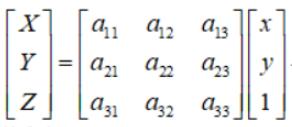
點的齊次坐標依賴于其尺度定義,因此矩陣H也僅依賴尺度定義,所以,單應性矩陣具有8個獨立的自由度。
如果在選取的不正確的特征點,那么透視矩陣就可能計算錯誤,所以為了提高結果的魯棒性,就要去除這些錯誤的特征點,而RANSAC方法就是用來刪除這些錯誤的特征點。
**RANSAC:**用來找到正確模型來擬合帶有噪聲數據的迭代方法。基本思想:數據中包含正確的點和噪聲點,合理的模型應該能夠在描述正確數據點的同時擯棄噪聲點。
RANSAC方法隨機獲取4對不同的特征匹配坐標,計算出透視矩陣H1,再將第二張圖的特征匹配點經過這個矩陣H1映射到第一張圖的坐標空間里,通過計算來驗證這個H1矩陣是否滿足絕大部分的特征點。
通過迭代多次,以滿足最多特征匹配點的特征矩陣H作為結果。
這樣正常情況就可以去除錯誤的特征點了,除非匹配錯誤的特征點比正確的還多。
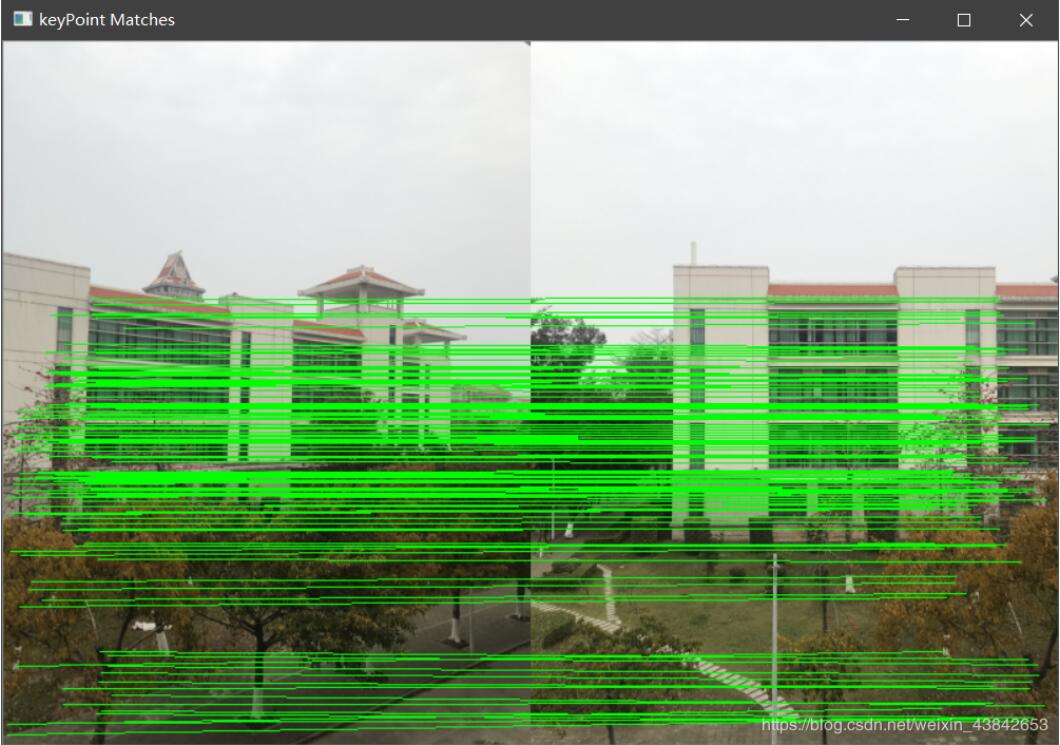
下圖是我在嘉庚圖書館旁拍攝的照片的特征點匹配。
步驟3:利用得到的變換矩陣進行圖片的拼接。
可以看出基本做到了無縫拼接。只是在色差上還是看得出銜接的部分存在。

實現結果
我在宿舍里又多照了幾組照片來實驗:
室內宿舍場景的特征點匹配:
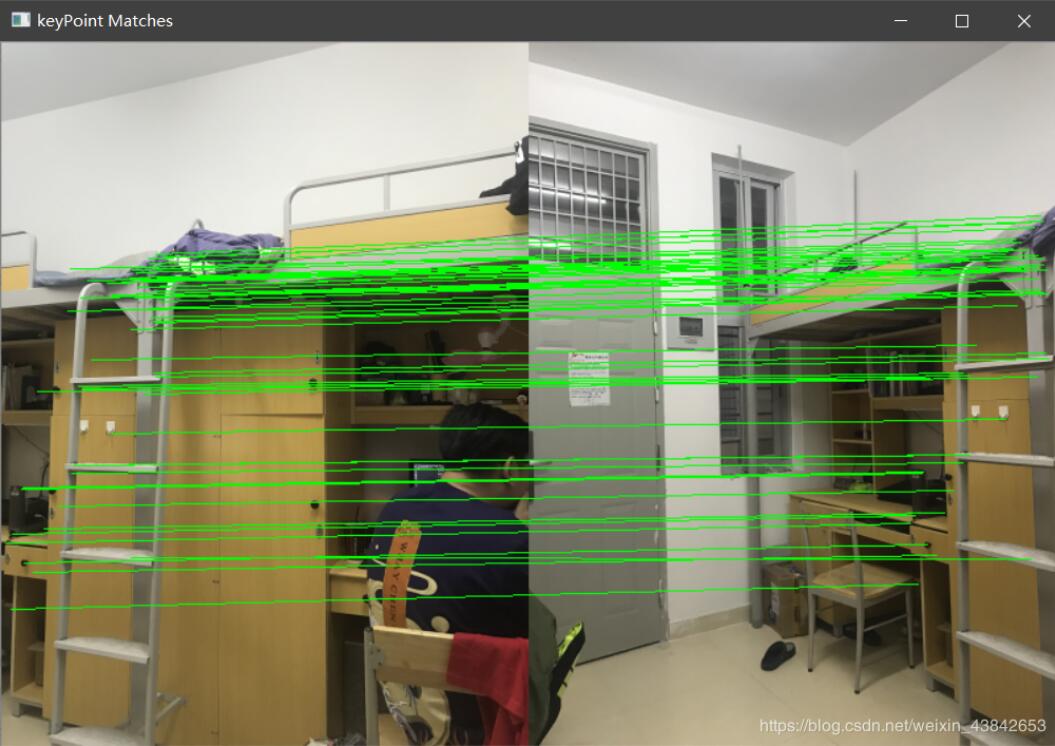
拼接結果:
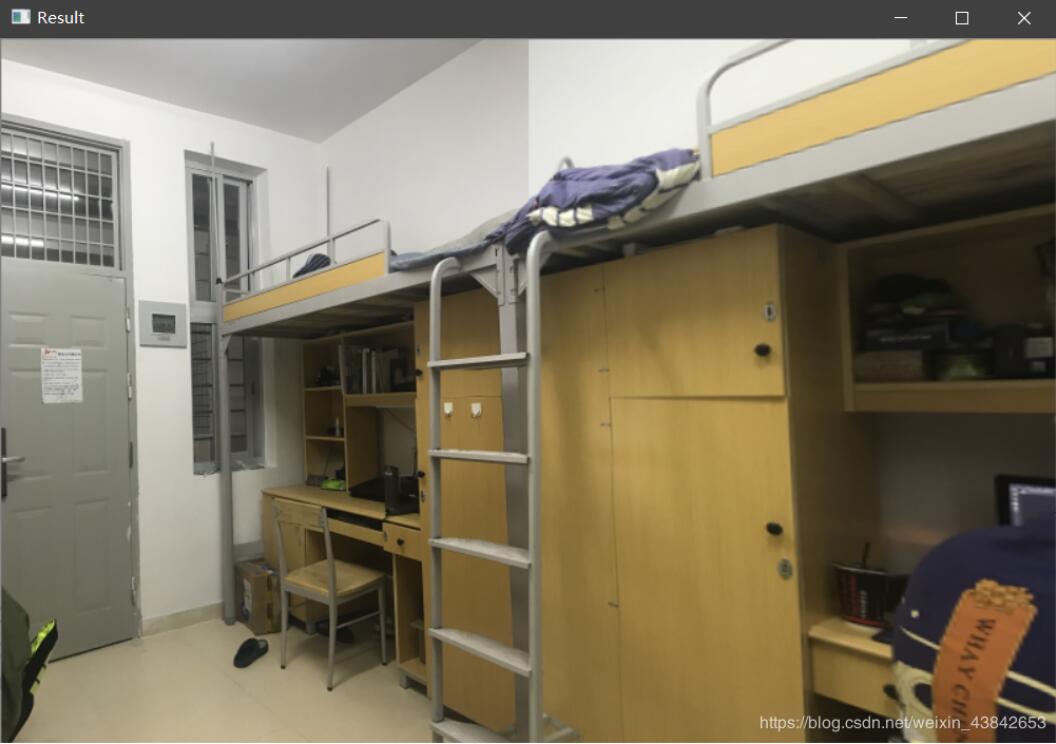
在室內的效果根據結果來看效果也還可以。
我測試了宿舍里景深落差較大的兩張圖片:
特征點匹配:
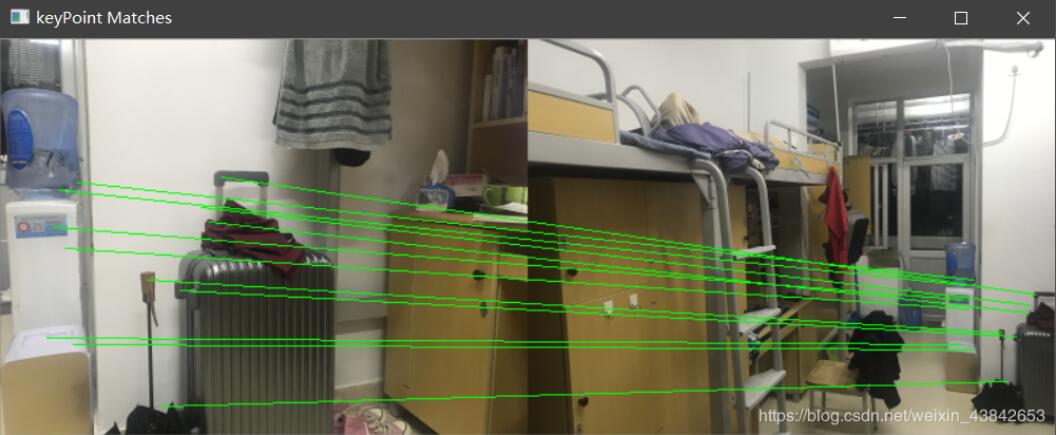
雖然距離較遠,但是還是可以粗略的匹配到特征點。
拼接結果:

從結果上來看可以看得出來,兩張圖片依然可以正確而粗略地拼接再一起,可以看得出是同一個區域。只是由于特征點不夠,在細節上景深落差較大的還是沒辦法完美地拼接。
import numpy as np
import cv2 as cv
import imutils
class Stitcher:
def __init__(self):
self.isv3 = imutils.is_cv3()
def stitch(self,imgs, ratio = 0.75, reprojThresh = 4.0, showMatches = False):
print('A')
(img2, img1) = imgs
#獲取關鍵點和描述符
(kp1, des1) = self.detectAndDescribe(img1)
(kp2, des2) = self.detectAndDescribe(img2)
print(len(kp1),len(des1))
print(len(kp2), len(des2))
R = self.matchKeyPoints(kp1, kp2, des1, des2, ratio, reprojThresh)
#如果沒有足夠的最佳匹配點,M為None
if R is None:
return None
(good, M, mask) = R
print(M)
#對img1透視變換,M是ROI區域矩陣, 變換后的大小是(img1.w+img2.w, img1.h)
result = cv.warpPerspective(img1, M, (img1.shape[1] + img2.shape[1], img1.shape[0]))
#將img2的值賦給結果圖像
result[0:img2.shape[0], 0:img2.shape[1]] = img2
#是否需要顯示ROI區域
if showMatches:
vis = self.drawMatches1(img1, img2, kp1, kp2, good, mask)
return (result, vis)
return result
def detectAndDescribe(self,img):
print('B')
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
#檢查我們使用的是否是penCV3.x
if self.isv3:
sift = cv.xfeatures2d.SIFT_create()
(kps, des) = sift.detectAndCompute(img, None)
else:
sift = cv.FastFeatureDetector_create('SIFT')
kps = sift.detect(gray)
des = sift.compute(gray, kps)
kps = np.float32([kp.pt for kp in kps]) # **********************************
#返回關鍵點和描述符
return (kps, des)
def matchKeyPoints(self,kp1, kp2, des1, des2, ratio, reprojThresh):
print('C')
#初始化BF,因為使用的是SIFT ,所以使用默認參數
matcher = cv.DescriptorMatcher_create('BruteForce')
# bf = cv.BFMatcher()
# matches = bf.knnMatch(des1, des2, k=2)
matches = matcher.knnMatch(des1, des2, 2) #***********************************
#獲取理想匹配
good = []
for m in matches:
if len(m) == 2 and m[0].distance < ratio * m[1].distance:
good.append((m[0].trainIdx, m[0].queryIdx))
print(len(good))
#最少要有四個點才能做透視變換
if len(good) > 4:
#獲取關鍵點的坐標
# src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
# dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
src_pts = np.float32([kp1[i] for (_, i) in good])
dst_pts = np.float32([kp2[i] for (i, _) in good])
#通過兩個圖像的關鍵點計算變換矩陣
(M, mask) = cv.findHomography(src_pts, dst_pts, cv.RANSAC, reprojThresh)
#返回最佳匹配點、變換矩陣和掩模
return (good, M, mask)
#如果不滿足最少四個 就返回None
return None
def drawMatches(img1, img2, kp1, kp2, matches, mask, M):
# 獲得原圖像的高和寬
h, w = img1.shape[:2]
# 使用得到的變換矩陣對原圖像的四個角進行變換,獲得目標圖像上對應的坐標
pts = np.float32([[0, 0], [0, h-1], [w-1, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv.perspectiveTransform(pts, M)
matchesMask = mask.ravel().tolist()
draw_params = dict(matchColor = (0, 255, 0),
singlePointColor = None,
matchesMask = matchesMask,
flags = 2)
img = cv.drawMatches(img1, kp1, img2, kp2, matches, None, **draw_params)
return img
def drawMatches1(self,img1, img2, kp1, kp2, metches,mask):
print('D')
(hA,wA) = img1.shape[:2]
(hB,wB) = img2.shape[:2]
vis = np.zeros((max(hA,hB), wA+wB, 3), dtype='uint8')
vis[0:hA, 0:wA] = img1
vis[0:hB, wA:] = img2
for ((trainIdx, queryIdx),s) in zip(metches, mask):
if s == 1:
ptA = (int(kp1[queryIdx][0]), int(kp1[queryIdx][1]))
ptB = (int(kp2[trainIdx][0])+wA, int(kp2[trainIdx][1]))
cv.line(vis, ptA, ptB, (0, 255, 0), 1)
return vis
# def show():
# img1 = cv.imread('image/sedona_left_01.png')
# img2 = cv.imread('image/sedona_right_01.png')
# img1 = imutils.resize(img1, width=400)
# img2 = imutils.resize(img2, width=400)
#
# stitcher = cv.Stitcher()
# (result, vis) = stitcher.stitch([img1, img2])
# # (result, vis) = stitch([img1,img2], showMatches=True)
#
# cv.imshow('image A', img1)
# cv.imshow('image B', img2)
# cv.imshow('keyPoint Matches', vis)
# cv.imshow('Result', result)
#
# cv.waitKey(0)
# cv.destroyAllWindows()
# show()
以上就是本文的全部內容,希望對大家的學習有所幫助,也希望大家多多支持億速云。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





