溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
很多人肯定很疑惑,在嵌入式開發中,為什么寫c代碼,就能夠控制硬件。這一切是怎么發生的了,下面我就給大家解剖一下,軟件是怎么控制硬件的。
我們從控制8個led為例來說明:
從最簡單的開始,如果使用硬件,控制8個led,最簡單的方式是什么:直接接上開關。就是以下的圖。通過開關控制led管腳輸出不同的電平,就能控制led了。但是這個方法很不靈活,我們要手動的去撥動開關,才能改變led狀態。

我們將上面電路改一下,把開關的地方換成寄存器,并加一些額外的電路,這樣就可以通過使能信號和信號值改變led值輸出不同電平,間接的控制led了。而使能信號和信號值我們是可以通過外部給的,就比開關要靈活一些了。
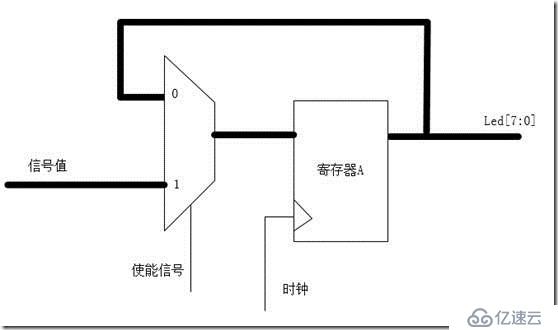
既然,上面有寄存器,我們可以給這個寄存器定義一個地址,當然這個地址目前是可以隨意定義的。假設為0x77777777。你可能會有疑問,為什么要給寄存器定義地址了?而且定義的地址為什么是32位了,這個先不著急,聽我慢慢道來。
我們繼續在前面加電路
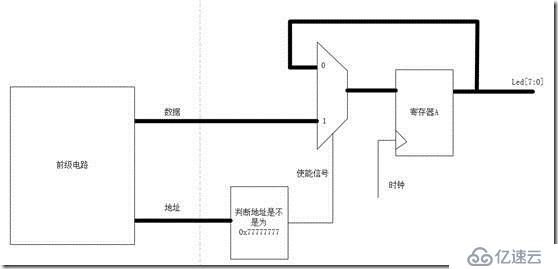
這里,多了一個前級電路,前級電路提供兩個信號,一個地址,一個數據。在地址信號通路上,有一個電路模塊,判斷地址是不是0x77777777,是的話,使能信號為1,這樣數據不就直接傳遞給寄存器了。不是的話,使能信號為0。寄存器的輸出不變。這樣,通過地址和數據就能改變led了。
這里0x77777777是不是很熟悉,這不就是之前定義的寄存器A的地址嗎?原來,地址就是用來產生判斷是否產生使能信號的,使能才能使數據能夠輸入到寄存器中。
到了這里,是不是對軟件控制硬件有些眉目了。別著急,我們繼續往下走。
既然前級電路只需要提供地址和數據,并且地址是0x77777777,就可以控制寄存器A的值了,而控制了寄存器A,就控制led。那么我們將前級電路換成一個32位CPU。
我們知道,CPU是可以產生3種總線信號的,一種地址總線,一種數據總線,一種控制總線。控制總線我們這里用不到。將地址總線接到地址線上,將數據總線接到數據線上。就是以下的電路:
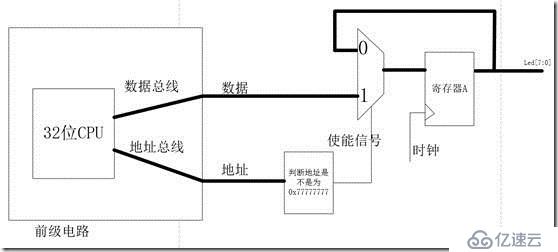
如果我們讓CPU產生地址為0x77777777,然后發出想要寫入寄存器A的數據B,那么數據B不就被寫入到寄存器A中,這樣,不就控制led了。這里知道為什么地址要32位的把,因為CPU是32位的,地址就是32位寬的。之所以定義32位的地址,目的是為了和CPU的地址總線32位寬兼容。
到這里,是不是有豁然開朗的感覺了。我們再繼續。
我們知道CPU是要取機器碼然后執行的。如果剛好某條機器碼,能讓地址總線上產生0x77777777,數據總線上產生數據B。那么結果,數據B不就被寫入到寄存器A中了。假設CPU是32位risc的CPU,機器碼就是32位。那么該機器碼應該是如下:
1001 0000 1110 0000 1011 1010 1111 0010(假設)
既然這是一條機器碼,那么就應該有一個匯編指令與之對應,假設是
str r0, r1
我們預先將地址0x77777777寫入到r0中,數據B寫入到r1中,那么上面一條語句執行后,不就將數據B寫入到寄存器A中了,不就控制led了。這樣不就實現了軟件控制了硬件了。既然匯編代碼可以控制硬件了,那么高級語言同樣也是控制硬件的,只要編譯后的匯編代碼是以上代碼就行了。
整體控制硬件的代碼就是
ldr r0, = 0x77777777
ldr r1, =B
str [r0], r1
對應的C代碼就是
(*(volatile unsigned long *)0x77777777) = B;
使用指針操作,往0x77777777地址的寄存器寫入數據B,加入volatile關鍵字,是防止編譯器對操作進行優化。
通過上面的過程,是不是也可以理解,為什么在嵌入式底層驅動開發中,基本都是用C語言,而不用其他高級語言,比如JAVA等。因為這些高級語言沒有指針,你就不能控制寄存器,不能控制寄存器了,你當然就控制不了硬件了。C++也很少用,因為底層驅動開發需要高效率代碼,不能太復雜,而C++在這方面,比不過C語言。
以上是寫入的過程了,如果想要知道led的狀態呢?通過讀取寄存器A的值,不就知道led的狀態了。原理是一樣的。只不過數據線要變成兩根,一個是負責寫,一根負責讀。電路圖如下:
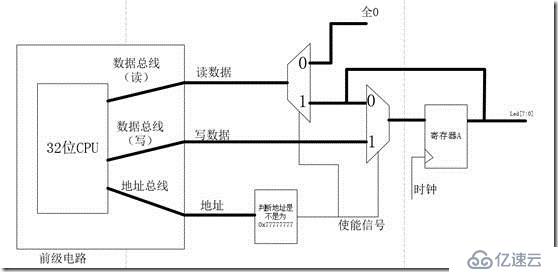
因為只考慮了一個寄存器,當不選中寄存器A時,讀取的數據為全0。
通過,上面的講述,對軟件控制硬件有沒有了解一些了。軟件控制硬件,本質上,就是通過寫代碼去修改或讀取硬件對應的寄存器的值。這樣,就相當于間接的控制了硬件。而硬件的寄存器地址對于一個處理器來說,都是固定的,都預先定義好了地址。所以在看ARM的數據手冊中,可以看到很多寄存器的地址。這些地址的作用,也就是能夠讓你在寫程序的時候,能夠正確的往這些寄存器里面寫入或讀取正確的值,從而控制硬件。
CPU對外看到的都是寄存器,所以硬件設計的時候,就要對硬件的功能設置幾個寄存器,然后對這幾個寄存器分別定義幾個地址,這樣CPU才可以去控制這幾個寄存器,也就能控制硬件了。定義的寄存器地址位寬是和CPU的地址線位寬是有關系的,如果是一個8位的CPU,也就是經典的C51,地址的寬度就是8位,所以你可以在頭文件reg51.c中看到使用sfr定義的地址位寬是8位。在STM32中,CPU是32位的,所以地址的寬度就是32位的,所以你看到STM32數據手冊中,寄存器的地址都是32位的,而且是4字節對齊的。
以上,CPU只是控制了一個硬件,led,但是我們知道,CPU是可以控制很多硬件的,那這又是怎么實現的了?這個就得談談片上互聯總線了。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





