溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇文章給大家分享的是有關ROS2和ROS1啟動launch的示例分析,小編覺得挺實用的,因此分享給大家學習,希望大家閱讀完這篇文章后可以有所收獲,話不多說,跟著小編一起來看看吧。
ros2-launch

通常,學習和使用ROS查閱wiki,如果輸入如下網址會有新的收獲:
注意區分,docs和wiki的差異。

以Foxy為例,再進一步查閱,可以看到非常好的文檔:
新文檔中增加了在云端使用ROS2的詳細說明!具體自行探索。
講到這里,我們回到launch。對比一下ROS1和ROS2
roslaunch-noetic
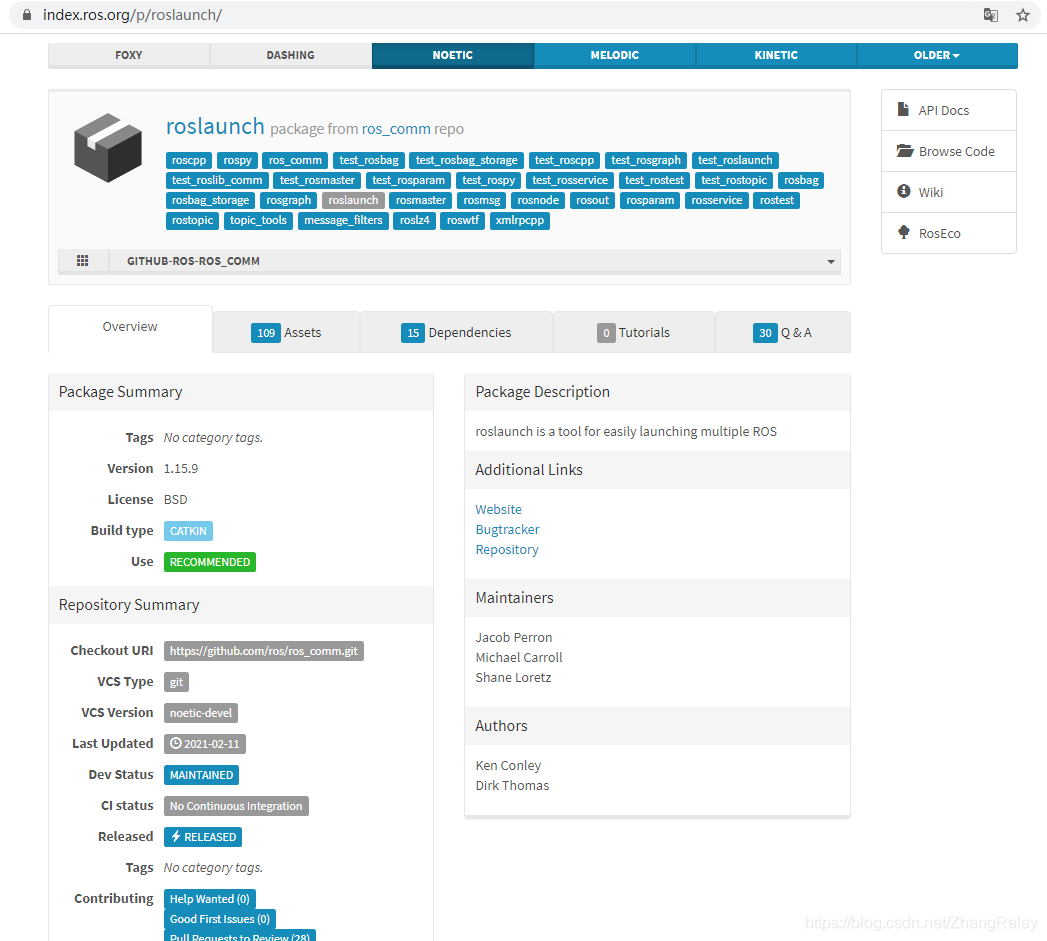
版本1.15.9,可見是穩定的版本,通常版本號>1.0,可以不嚴謹的認為是相對可靠的版本。
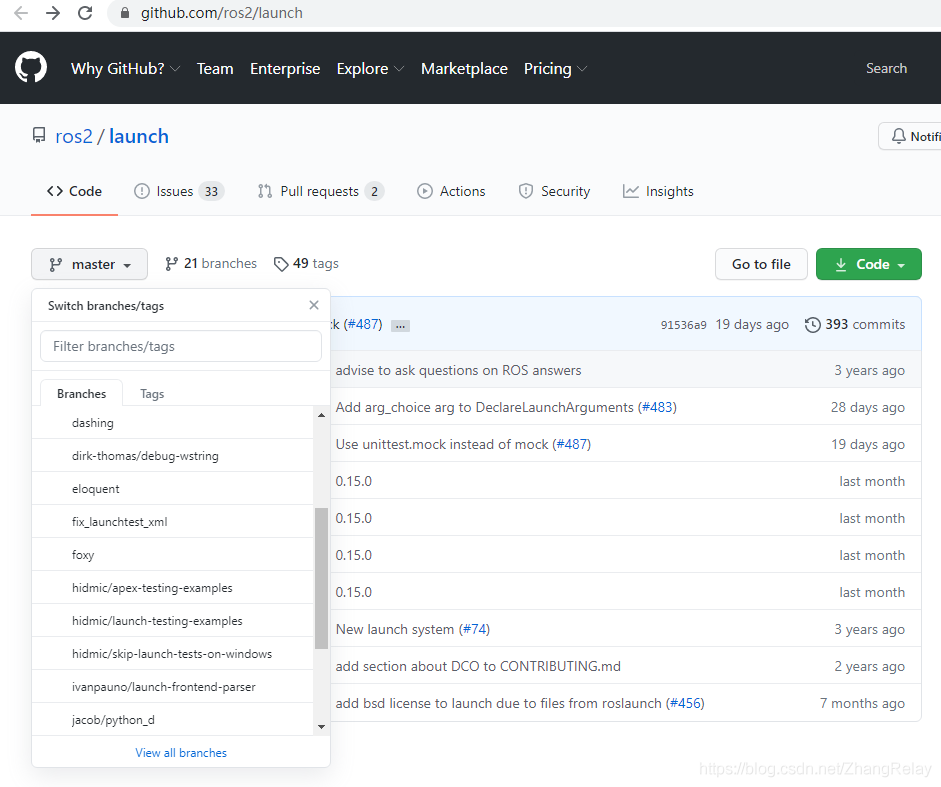
ros2-launch-foxy

版本0.10.4,這種版本號,兩個意思,功能還在快速開發迭代中,文檔也不完整!
那么怎么辦?
如果想掌握好,docs,wiki,code缺一不可!!!
需要閱讀ros2 - launch的源代碼,這樣就能掌握基本的使用,高階使用自然也輕松,還能自定義launch功能,前提是源碼修改!
注意版本號!
以上就是ROS2和ROS1啟動launch的示例分析,小編相信有部分知識點可能是我們日常工作會見到或用到的。希望你能通過這篇文章學到更多知識。更多詳情敬請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





