溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇文章給大家分享的是有關PostgreSQL中空閑數據塊管理機制的原理是什么,小編覺得挺實用的,因此分享給大家學習,希望大家閱讀完這篇文章后可以有所收獲,話不多說,跟著小編一起來看看吧。
數據塊空閑空間的產生
根據PostgreSQL的MVCC機制,所有UPDATE和DELETE操作都會產生過期數據,需要通過vacuum命令來清理過期數據。vacuum命令基本上有兩種:
VACUUM
將過期tuple對應的磁盤空間標記為可用,但不會真正釋放空間給操作系統,其他程序無法再利用。該操作執行時不會要求排它鎖(EXCLUSIVE LOCK),不影響表讀寫操作。
VACUUM FULL
將正常的tuple數據拷貝到新磁盤文件中,重新組織,將原數據文件刪除,未使用的磁盤空間退還給操作系統,該操作執行時需要獲取排它鎖,會影響正常的讀寫操作。因此執行該操作時需要慎重,特別是表數據量較大時,執行時間會比較長。
我們知道PostgreSQL的表(Relation)實際上是由多個物理數據塊(頁)組成,當執行vacuum操作后,這些數據塊中的保存有過期記錄(tuple)的磁盤空間就會被標記為可用,就會產生空閑空間。
當新增記錄(tuple)時,會優先重新利用表中數據塊的空閑空間,而不是分配一個新的數據塊。然而當多個數據塊都有空閑空間時,該選取哪個數據塊來保存新記錄呢?被選取的記錄必須要能夠有足夠的空間存放新記錄。
空閑數據塊的組織結構
為解決以上問題,PostgreSQL設計了FSM(Free Space Map)結構來表示各個數據塊中空閑磁盤空間的大小。在pg8.4版本之后,每個表(Relation)都會獨立的FSM空間,具體表現為以_fsm為后綴的物理文件:
-bash-4.2$ cd $PGDATA/ins2/base -bash-4.2$ ll *fsm -rw------- 1 postgres postgres 24576 Jun 26 15:40 1247_fsm -rw------- 1 postgres postgres 24576 Jun 26 15:40 1249_fsm -rw------- 1 postgres postgres 24576 Jun 26 15:40 1255_fsm
FSM文件的存儲結構如下所示:
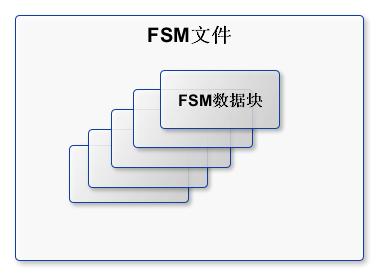
為了快速搜索到合適數據塊,減少因搜索帶來的IO開銷(即節省FSM文件大小),FSM結構只使用一個字節來記錄一個數據塊中的空閑磁盤空閑大小,因1byte=8bits,那么就可以記錄2^8種空閑磁盤大小,假設一個數據塊大小(BLCKSZ)為8k(PostgreSQL默認為8k),那么就可以劃分成256(2^8)等份,每份有BLCKSZ/256字節來表示范圍,示例如下:
Range Category 0 - 31 0 32 - 63 1 ... ... ... 8096 - 8127 253 8128 - 8163 254 8164 - 8192 255
FSM數據塊內的數據結構
知道了數據塊中空閑空間大小的表示方法,那如何來組織這些表示記錄,保持高效查詢效率呢?答案是PostgreSQL使用了一種二叉樹結構(大根堆)來存儲這些表示空閑空間大小的記錄,葉子節點存儲實際的空間大小記錄,非葉子節點只是作為輔助查詢。當需要查詢是否有合適的數據塊大小時,只需要先比較樹的根節點即可知道,大大減少了查詢次數。大根堆數據結構示例如下:
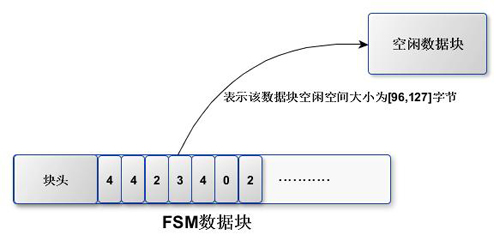
4 4 2 3 4 0 2 <- This level represents heap pages
上述例子中葉子節點的值3,4,0,2分別代表了空閑數據塊的map值,值3代表的就是空閑磁盤空間大小在[96,127]的數據塊。PostgreSQL源碼中FSM頁數據結構定義如下:
typedef struct { int fp_next_slot; uint8 fp_nodes[FLEXIBLE_ARRAY_MEMBER]; } FSMPageData;其中,fp_next_slot指向的是下一次查詢開始的slot位置,具體作用稍后闡述,fp_nodes數組存儲二叉樹的節點值。FSM數據塊內的數據存儲結構類似如下圖所示:
按照這種存儲結構,一個FSM數據塊(存儲FSM記錄的數據塊,和普通數據塊大小是一致的)可以存儲的實際記錄數(數據塊的空閑空間大小對應的map value)為:
(BLCKSZ - headers) / 2 //除以2是因為二叉樹的葉子節點數約為總節點數的1/2
其中,BLCKSZ表示數據塊大小,headers表示數據塊固定大小的頭部信息。如果按照數據塊默認大小8k,那么單個FSM數據塊可存儲的記錄數大約為4000個,另外,PostgreSQL中一個表(Relation)最多可以有2^32個數據塊,那么最多就需要2^32條map記錄來表示這些數據塊中擁有的空閑空間大小,顯然,單個FSM數據塊是無法存儲下這些記錄,實際需要約2^32/4000個FSM數據塊來存儲。
前面我們介紹了單個FSM數據塊內的存儲map值的數據結構,當有多個FSM數據塊時,但是我們又該按照什么順序去選擇FSM數據塊頁來搜索呢?順序查找FSM數據塊顯然效率太低。
FSM數據塊間的邏輯組織結構
為了提升查找FSM數據塊的效率,PostgreSQL采用Higher-level(類似多叉樹)的邏輯結構來組織FSM數據。為每個FSM數據塊指定一個額外的邏輯結構FSMAddress,數據結構定義如下:
#define FSM_TREE_DEPTH ((SlotsPerFSMPage >= 1626) ? 3 : 4) #define FSM_ROOT_LEVEL (FSM_TREE_DEPTH - 1) #define FSM_BOTTOM_LEVEL 0 typedef struct { int level; /* level */ int logpageno; /* page number within the level */ } FSMAddress;其中,level表示該FSM數據塊所處的層號,logpageno表示在該層中的序號,序號從0開始。類似于FSM單個數據塊內的存儲方式,只有在***層(level=0)的FSM數據塊才實際存儲記錄,其它層作為查詢的輔助層,上層的葉子節點值代表了下層的根節點值。
那需要多少層邏輯結構才能表示所有的數據塊記錄呢,答案是當一個FSM數據塊內存儲超過1626條記錄(map value)時,采用三層即可,因為162616261626>=2^32。
下面用一個示意圖來表示整體的組織結構,為了讓示意圖簡化,只在圖中每個數據塊存放4個字節的數據,這和存放1626個字節原理是一致的。FSM文件各數據塊間邏輯組織結構示意圖如下:
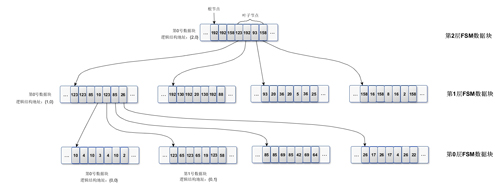
如圖所示,第2層數據塊中葉子節點值123就代表了它下一層(第1層)第0號數據塊的根節點值,而第1層第0號數據塊的葉子節點值123則代表的是第0層第1號數據塊的根節點,第0層第1號數據塊的葉子節點值123代表的是空閑空間大小為[3936,3967]字節的數據塊。每個數據塊都有邏輯地址,如第1號數據塊的邏輯地址{1,0}表示第1層的第0號FSM數據塊,實際上是對應的FSM物理文件的第1號數據塊。第2層和第1層的FSM數據塊內存儲的數據都只是作為輔助層索引,實際上只有第0層FSM數據塊內的葉子節點才存儲著表中空閑數據塊的map值,其他節點均是索引值。
空閑數據塊的搜索算法
上面介紹了空閑數據塊的表示方法和FSM文件中各數據塊的組織形式,接下來將介紹空閑空間數據塊的搜索算法。
首先,先介紹FSM數據塊內的查找算法。對于大根堆二叉樹查找,簡單的方法就是每次從root節點開始比較查找,如果root節點小于待查找值,則表示該塊內沒有滿足條件的map value,否則可以繼續向下找到一個滿足條件的葉子節點。但是PostgreSQL的設計并不是這樣的,而是通過之前介紹的FSMPageData結構體的fp_next_slot來保存下一次查詢的起點位置(slot),搜索算法如下:
比較根節點值,如果待查詢值大于根節點,則直接返回,表示該FSM數據塊內沒有滿足條件的map值,否則進行下一步。
比較查詢的起點位置(slot)對應的map值,如果不滿足條件,則進行下一步,否則跳到第5步。
設置新查詢位置為下一個slot(slot序號+1,slot值代表了在葉子節點的順序號)的父節點,再比較,如果不滿足條件則重復該步驟,直到向上查找到根節點。如果找到滿足條件的中間節點,則進行下一步。
向下查找,找到滿足條件的葉子節點,然后進行下一步。
重新設置下一次查詢的fp_next_slot變量,然后返回該葉子節點的slot。
FSM數據塊內搜索算法的核心源碼如下:
FSM數據塊內搜索算法的核心源碼如下: int fsm_search_avail(Buffer buf, uint8 minvalue, bool advancenext, bool exclusive_lock_held) { ...... restart: if (fsmpage->fp_nodes[0] < minvalue) //每次查詢先檢查根節點是否滿足條件 return -1; target = fsmpage->fp_next_slot; if (target < 0 || target >= LeafNodesPerPage) target = 0; target += NonLeafNodesPerPage; nodeno = target; //開始查詢時的slot位置 while (nodeno > 0) { if (fsmpage->fp_nodes[nodeno] >= minvalue) break; nodeno = parentof(rightneighbor(nodeno)); //返回下一個slot的父節點位置 } while (nodeno < NonLeafNodesPerPage) //向下查找到葉子節點 { int childnodeno = leftchild(nodeno); //先查看左子節點 if (childnodeno < NodesPerPage && fsmpage->fp_nodes[childnodeno] >= minvalue) { nodeno = childnodeno; continue; } childnodeno++; //左子節點不滿足條件查找右子節點 if (childnodeno < NodesPerPage && fsmpage->fp_nodes[childnodeno] >= minvalue) { nodeno = childnodeno; } else { //都沒找到,說明當前可能存在"torn page"的情況( IO寫磁盤數據時出現crash,只有部分數據寫入) //重新更新頁數據后再查詢 ....... fsm_rebuild_page(page); ...... goto restart; } } slot = nodeno - NonLeafNodesPerPage; //找到slot序號 fsmpage->fp_next_slot = slot + (advancenext ? 1 : 0); //保存下一次查詢開始的slot位置 return slot; }至此,就找到了該FSM數據塊中滿足條件的葉子節點,如果該頁不是處在第0層,則該葉子節點并不是我們最終查詢目標,根據前述FSM數據塊間的組織結構可知,輔助層中葉子節點對應的是下一層FSM數據塊的根節點,因此,需要繼續向下查找到第0層的對應葉子節點。查找葉子節點對應下一層的數據塊則是通過返回的slot值來計算的,核心查找算法源碼如下:
for (;;){ ...... slot = fsm_search_avail(buf, min_cat, (addr.level == FSM_BOTTOM_LEVEL), false); ...... if (slot != -1) //找到滿足條件的葉子節點,否則退出循環 { if (addr.level == FSM_BOTTOM_LEVEL) //查找到第0層,返回結果 return fsm_get_heap_blk(addr, slot); addr = fsm_get_child(addr, slot); //非第0層,繼續查找子樹 } ...... } static FSMAddress fsm_get_child(FSMAddress parent, uint16 slot) { FSMAddress child; Assert(parent.level > FSM_BOTTOM_LEVEL); child.level = parent.level - 1; child.logpageno = parent.logpageno * SlotsPerFSMPage + slot; //根據上一層的slot查找下層對應數據頁的logpageno return child; }整個搜索算法就介紹完畢,至于為什么要把fp_next_slot來作為起始查詢位置而不是root節點呢?原因有幾點:
當有多個后端連接同時新增tuple時,可以盡量避免對同一數據塊的寫沖突,提高寫并行度。如果每次都從root節點開始查找,有可能多個查詢都同時查找到同一個數據塊。
獲取的是上一次返回查詢結果的臨近數據塊,更有利于提升磁盤IO效率。
更新空閑數據塊空間大小
查找到表中合適的空閑數據塊后,新記錄會寫入該數據塊,然后需要更新該數據塊的空閑空間大小。相較于搜索,更新相對簡單,核心思想就是先重新計算該空閑數據塊的map值,然后更新在FSM數據塊中對應葉子節點的值,再以“冒泡”的方式向上不斷更新,直到更新到父節點值不變化或者root節點。核心源碼如下:
fsmpage->fp_nodes[nodeno] = value; //更新當前節點 do { ...... nodeno = parentof(nodeno); lchild = leftchild(nodeno); rchild = lchild + 1; newvalue = fsmpage->fp_nodes[lchild]; if (rchild < NodesPerPage) //右子節點存在,則選取***值作為父節點的新值 newvalue = Max(newvalue, fsmpage->fp_nodes[rchild]); oldvalue = fsmpage->fp_nodes[nodeno]; if (oldvalue == newvalue) //檢查更新后父節點是否有變化 break; fsmpage->fp_nodes[nodeno] = newvalue; //有變化,更新父節點,繼續向上更新 } while (nodeno > 0); //更新到root節點退出鎖
搜索空閑數據塊時只會對當前搜索的FSM數據塊加共享鎖(shared buffer locks),更新FSM數據塊時才會加排它鎖(exclusive buffer lock)。這里值得注意的一點是在搜索時,使用了fp_next_slot變量來表示下一次搜索的起點位置,并沒有為之加一個排它鎖,因為維持一個排它鎖的代價遠比fp_next_slot變量出現異常后的代價大很多。
以上就是PostgreSQL中空閑數據塊管理機制的原理是什么,小編相信有部分知識點可能是我們日常工作會見到或用到的。希望你能通過這篇文章學到更多知識。更多詳情敬請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





